Consejos de Mallado y Análisis por Elementos Finitos con Simcenter FEMAP y Simcenter Nastran
A menudo publico vídeos en mi canal de YOUTUBEcon consejos de mallado y análisis por Elementos Finitos para responder con mucho gusto a preguntas tanto sobre Simcenter Nastran como Simcenter FEMAP planteadas en diferentes foros de ingeniería como ENG-TIPS, o en los propios foros de SIEMENS tales como Simcenter-Femap-Community y Simcenter-Nastran-Community, o en el grupo de Femap en Facebook, etc.. Me gustaría reunir algunos de esos videos junto con las imágenes y animaciones incluidas en mis respuestas de los últimos 6 meses y juntar aquí todo en un POST, básicamente para que no se pierda todo ese conocimiento y sirva de ayuda primero a nuestros clientes y usuarios, y también quede a disposición de todos los miembros de este BLOG, así como visitantes y amigos del Mallado y Análisis por Elementos Finitos con FEMAP, ¿OK?. Pues vamos a por ello!!.
Desde IBERISA queremos desear a todos nuestros clientes y amigos que paséis una fiestas divertidas y entrañables en compañía de la familia, amigos, mascotas y demás seres queridos, y que el próximo año 2018 venga lleno de grandes alegrías y éxitos en el trabajo; y salud, mucha salud, que al final es lo que más importa!!.
Cómo se hizo (“Making-Of”)
Todo empezó en Solid Edge ST10 donde utilizando la orden PERFIL DE TEXTO se genera una operación sólida 3-D de extrusión del texto “zorionak” (significa “felicidades” en Euskera) escrito en pantalla. La fuente de texto utilizada es la Lucida Handwriting para conseguir que todas las letras de la palabra “zorionak” estén unidas entre sí para formar un sólido único. Bueno, casi todo menos la letra “i” por culpa del punto, al final nos queda una pieza con tres sólidos.
El modelo CAD 3-D sólido generado en Solid Edge S10 se importa en FEMAP V11.4.2 y se crea la geometría sólida de unión entre las letras “r” e “i“, así como la unión con el punto de la letra “i“, se simplifica la geometría en FEMAP usando la orden CleanUP y se deja todo listo para el mallado con elementos 3-D sólidos tetraédricos CTETRA de 10-nodos, mallando con al menos 3 elementos en el espesor de cada letra.
Y finalmente se aplica el material Aluminio 3004, se sujeta por los extremos y se somete el modelo FEM a un análisis estático lineal de peso propio con el solver NX NASTRAN V11.0.2, cuya animación de la deformada la tenéis en la siguiente imagen:
Hello!,
I have answered a question in the FEMAP FORUM about how to mesh with 3-D solid elements a complex assembly, here the requirement was to have at least 3 elements in the AIR VOLUME GAP between solidcapacitors to capture with accuracy the fluid flow between components. The following picture shows the simplified geometry proposed by the end user and uploaded to the FEMAP Community to be used to show how to mesh with 3-D solid elements.
1.- HEX Meshing using SWEEP method
I have recorded a video where I teach how to mesh the above assembly using an alternate method to the classical one based in slicing solids and later use command MESH > MESH CONTROL > SIZE ON SOLID that automatically performs the multi-solid sizing in assemblies. Not, my alternative method is “manual” but not complex at all, basically we use the commands MESH > SWEEP followed by MODIFY > ASSOCIATIVITY > AUTOMATIC that allows to generate perfectly shaped hexahedral 8-nodes elements with excellent quality and very low reduced model size, valid only in such special cases where the geometry has a predominant direction of extrusion.
The first step in the model geometry preparation is to use command TOOLS > CONVERT UNITS because I noted the geometry was in meters, and the wall thickness of AIR GAP is only 2.54 mm, then to have 3 elements in the thickness the element size should be 2.54/3=0.85 mm (ie, 0.00085 meters). My experience tells me that working in meters in FEMAP is not recommended at all for both meshing and geometry reasons, the mesher can give error due to tight tolerances used internally by FEMAP. To help the conversion units more automatically search in the FEMAP directory where you have *.CT files like IDEAS_from_m_N_degK_to_mm_N_degC.CF that include all parameters to convert the full database of FEMAP (not only geometry, but also material properties, loads, etc..) from meters to milimeters:
The next step is to prepare the base 2-D mesh to sweep along a curve in the extrusion direction: the key is to use GEOMETRY > Curve – from Surface > Project command, first select the top surface and next select ALL curves to project over that surface, the result will be the following figure:
The next step is to mesh the splitted surfaces with 2-D Plot-Only elements: to arrive to a mapped mesh the key is to use MESH > MESH CONTROL > APPROACH ON SURFACE command and prescribe to all surfaces the option MAPPED – FOUR CORNER, the result after meshing is great, magic!, see next picture.
Next after using the MESH > SWEEP command the resulting HEXAHEDRAL 8-nodes 3-D solidelements will have an extremely good quality mesh, you can see yourself, the ASPECT RATIO = 1.0, perfect!. And the resulting model size is really, really low, the lowest possible. Also HEXAHEDRAL elements provide the best accuracy possible, they have superior performance to ANY other 3-D solid element, nothing compares.
The final step will be to use MODIFY > ASSOCIATIVITY > AUTOMATIC command, select ALL elements, next select ALL solids, and do not forget to activate the option DETAILED ASSOCIATIVITY SUMMARY, this will help you to control that not any element or node failed to associate with geometry. This command is great, in addition to the nodes and elements being associated to the main entity, they will then also be associated to the surfaces of solids, curves on those surfaces, and points on those curves allowing you to use geometry based commands in FEMAP (i.e., Loads and Constraints on geometry, any selection method using a geometric entity, etc.).
To learn more how to do it, please take a look to this video and enjoy!. By the way, sorry for my bad english speaking, I need to practice more!.
Also take a look to this another video, I have recorded as well to explain how to use HEX meshing with simply geometry solids, the idea was to explain how simple is to HEX mesh solids, then not need to think in meshing with tetrahedral elements all the time. The geometry is simply, I tried to explain basically the above geometry manipulation and meshing procedures. Ah!, enjoy the Country music.
And finally another example of HEX meshing using the great “MESH > SWEEP” command in FEMAP, in this case the solid part was meshed originally with TET10 elements resulting in a total model size of 49437 nodes: the same geometry meshed with HEX8 elements using exactly the same element size results in only 6872 nodes, a reduction of more than 86%, ie, meshing with TET10 elements will increase the model size in more than 7x times!! (enjoy the COUNTRY music again, I love it!, definitely I am a man of few words, better facts!!).
2.- TET Meshing using NonManifold-Add
The next recorded video shows the Tetrahedral meshing approach that need to be followed with multi-solid assemblies where touching solid faces don´t have the same size. Here, I will show you how the two commands GEOMETRY > SURFACE > NonManifold-Add and GEOMETRY > SURFACE > RECOVER MANIFOLD GEOMETRY plays a critical role in cases where adjacent surfaces DON’T HAVE THE SAME SIZE: solid faces are coincident (touching each-other, yes), but if the two surfaces don’t have exactly the same size the mesh matching is not performed successfully, and the mesher will give errors of type “Unable to link mesh locations between Surface XXX and Surface YYY. Surfaces must be on same solid or coincident“.
To set the element size in multi-solid assemblies using the classical command MESH > MESH CONTROL > SIZE ON SOLIDS you need to SELECT ALL SOLIDS AT THE SAME TIME, and FEMAP will set a “slaved” mesh approach on surfaces that are adjacent to each other and with the same size. The user must ensure that the meshes on these two surfaces are identical. Setting one of the surfaces as a slave to the other insures a consistent mesh. This option automatically finds surfaces which are adjacent between multiple solids and slaves them to each other.
In cases where solid faces are touching each-other but don’t have the same size, simply run command Geometry > Surface > NonManifold-Add, select all solids and done!. The result will be ONE “Non-Manifold Solid Geometry”, an option in the Parasolid modeling kernel which creates “General Bodies” as opposed to regular solids (FEMAP solids). The command allows you to essentially Boolean Add solids to one another.
The key will be next to useimmediately the command “Geometry > Surface > Recover Manifold Geometry“, here FEMAP will take the selected “general body” in your model and separate them into component “Manifold” Parasolid solids (FEMAP solids), maintaining the imprinted curves between touching surfaces, in summary, having coincident surfaces between solids with exactly the same size, and then the process of slaving mesh approach required to have consistent mesh between coincident surfaces will be successfully performed, OK?.
In the next video you can see that ALL solid bodies are initially perfectly cleaned, not any imprint exist, like the air component of the following image:
After using the command NonManifold-Add selecting all solids, followed by Recover Manifold Geometry then all components are each-other imprinted, see the result on the Air component:
It’s surprising how the command NonManifold-Add that is used mainly to work with stitched surfaces to mesh with 2-D Shell elements plays an important role (together with Recover Manifold Geometry command) to mesh multi-solid assemblies with 3-D Solid elements. Well, take a look to the following video where I explain how to perform the meshing approach, I hope you understand perfectly the workflow, if you have any question please do not hesitate to contact me, it will be a pleasure to be of help!!. Ah!, again the system of units here is critical, more than ever, working in millimeters is mandatory, forget at all to use meters. If for any reason you need to work in meters (typical in CFD jobs), first solve the meshing task in millimeters and when successful use command TOOLS > CONVERT UNITS to convert your model from millimeters to meters, OK?.
Breakout Modelinges un concepto que permite evaluar tensiones en un pequeño detalle o porción de una pieza (LOCAL o SOURCE MODEL) a partir de los resultados de desplazamientos del conjunto o ensamblaje completo (GLOBAL o TARGET MODEL). Los dos modelos de Elementos Finitos pueden contener mallas completamente diferentes, tanto de tipo (2-D ó 3-D) como de forma (2-D Shell CQUAD4, 3-D Solid CHEXA, etc..). FEMAP ofrece diferentes opciones para “mapear” datos e interpolar resultados desde el modelo global al modelo local.
El Workflow a seguir con la técnica del Breakout Modeling es el siguiente:
El primer paso es analizar la estructura global usando una malla relativamente grosera, y obtener los resultados de desplazamientos y tensiones típico de cualquier análisis estructural, lineal y no lineal.
Seguidamente creamos el modelo BREAKOUT, es decir, cortamos una porción del modelo global donde queremos obtener al detalle la concentración de tensiones existente en la zona más crítica. Aquí usaremos una malla muy refinada para capturar cualquier detalle de la geometría real.
El siguiente paso es “mapear” los resultados de desplazamientos desde el modelo global y aplicarlos como condiciones de contorno de desplazamiento (enforced displacements) en los planos de corte del modelo BREAKOUT.
Finalmente calcular el modelo para evaluar tensiones.
Usos del Breakout Modeling
Se recomienda el uso del Breakout Modeling por las siguientes razones:
Crear una malla muy refinada de la estructura completa pueda resultar muy “cara” y costosa en términos de prestaciones, excesivo tamaño del modelo y requisitos de hardware (memoria RAM) elevados, especialmente en análisis no lineal.
Una malla global muy refinada (y por consiguiente un tamaño de modelo muy elevado) pueda aumentar de forma significativa el tiempo de cálculo de cara a realizar variantes y modificaciones del diseño.
Cuando la evaluación de tensiones deba realizarse con el modelo existente (con malla grosera).
Resulte difícil localizar por adelantado las zonas críticas del modelo, ya que muchas veces no es obvio.
En resumen, si tras ejecutar el Análisis por Elementos Finitos de un gran modelo descubres durante el postprocesado y examen de resultados que existe una zona de especial interés en la cual has utilizado una malla grosera, la mejor alternativa frente a rehacer el modelo y crear una malla más refinada a nivel global es la técnica de BREAKOUT MODELING aplicada exclusivamente a la zona de interés local.
Este concepto funciona muy bien porque incluso con una malla global relativamente grosera el Método de Elementos Finitos ofrece una precisión excepcional en la predicción del campo de desplazamientos en un modelo estructural (¡¡la convergencia en desplazamientos está prácticamente casi siempre asegurada!!). Debido a que el modelo local presenta una malla muy refinada se pueden obtener resultados de tensiones y deformaciones unitarias con una muy elevada precisión en base a las derivadas del campo de desplazamientos, OK?.
Breakout Modeling Workflow
1.- En primer lugar creamos el modelo de la estructura usando una malla grosera. Lo interesante de esta técnica es que el modelo global puede estar muy simplificado, podemos ignorar perfectamente cualquier tipo de detalle en la geometría (tales como pequeños agujeros, redondeos, radios de acuerdo, etc..) ya que la malla grosera utilizada en el modelo global no es lo suficiente refinada para capturar los pequeños detalle de la geometría real.
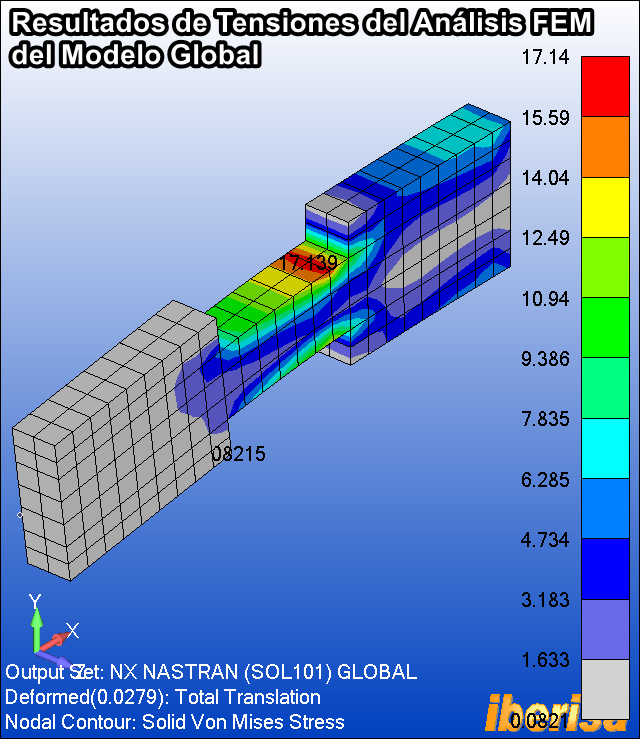
2.- Seguidamente ejecutamos el análisis por elementos finitos del modelo global con malla grosera para obtener el campo de desplazamientos y tensiones resultantes. Nos interesa estudiar la concentración de tensiones máximas que se produce en la cambio de sección de la pieza, donde además existe un radio de acuerdo de valor muy pequeño.
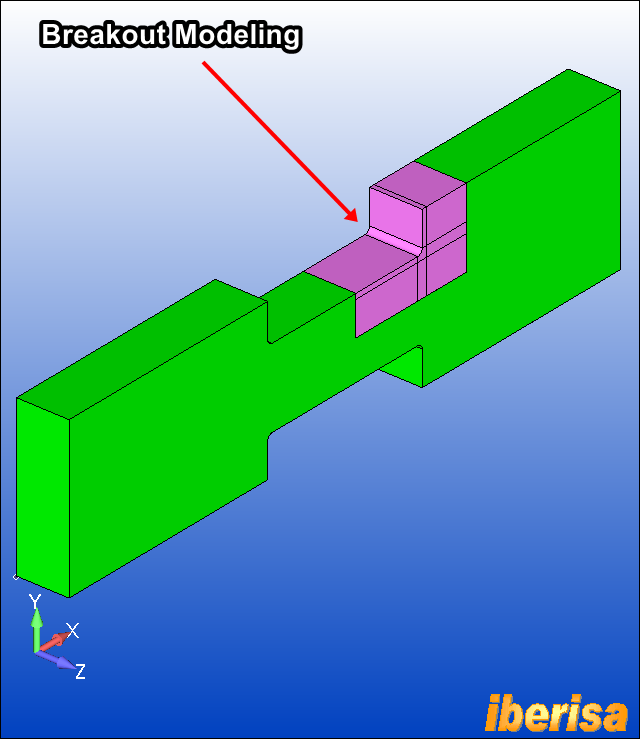
3.- El siguiente paso es crear el Breakout Modeling tras identificar (basándonos en los resultados de tensiones del modelo global) las zonas críticas de interés. En el ejemplo siguiente nos interesa conocer la concentración de tensiones local que se produce en el radio de acuerdo, para lo cual partimos el modelo global y nos quedamos con una geometría reducida alrededor del redondeo.
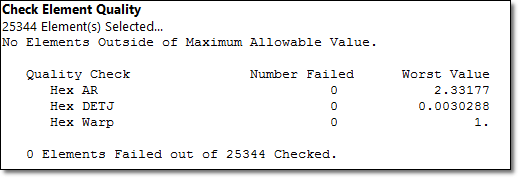
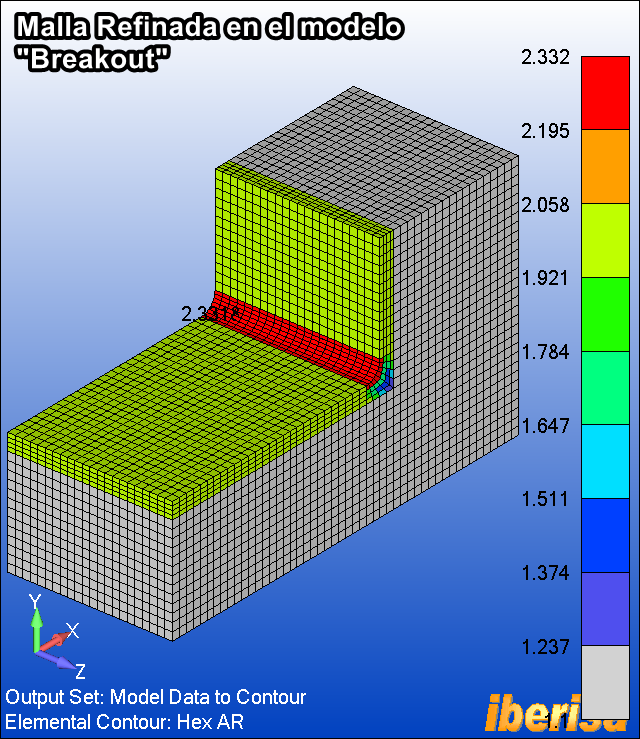
4.- Mallamos el modelo local con una malla muy refinada de excelente calidad a base de elementos 3-D Sólidos CHEXA de 8-nodos, dividiendo la superficie del radio de acuerdo con 8 elementos, lo cual nos asegura capturar perfectamente la concentración de tensiones que se produzca en el súbito cambio de geometría.
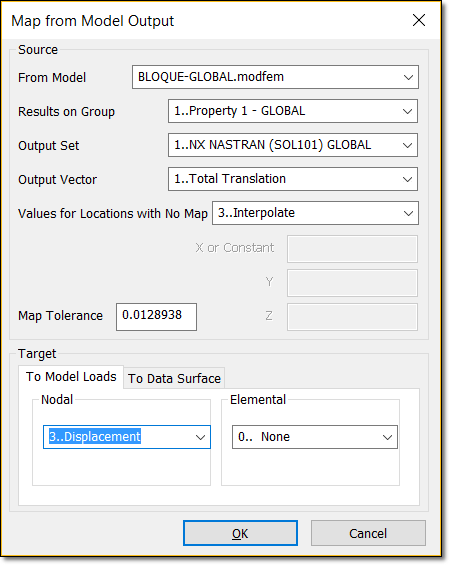
5.- A continuación en FEMAP procedemos a “mapear” resultados del modelo global al modelo local utilizando la orden “Model > Load > Map Output from Model ..“. Para que el proceso funcione correctamente tanto el modelo global (SOURCE) como el modelo local (TARGET) deberán estar abiertos simultáneamente en la misma sesión de FEMAP. Además, en el modelo global (SOURCE) se deberá crear un grupo de elementos con los resultados a “mapear” en los nodos o elementos del modelo local (TARGET).
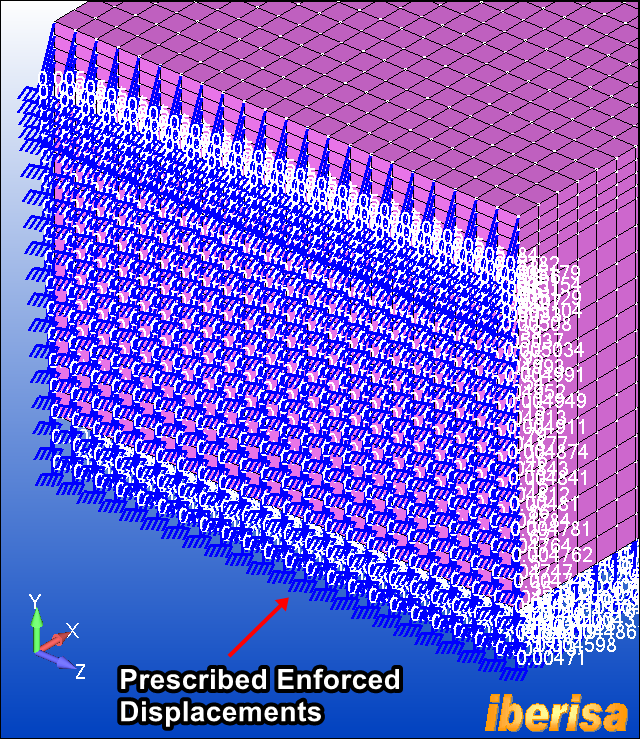
Seguidamente FEMAP nos indicará que seleccionemos los nodos sobre los cuales queremos “mapear“, es decir, interpolar el campo de desplazamientos del modelo global en el modelo local, seleccionando las superficies de corte del modelo BREAKOUT. Los resultados de desplazamientos del modelo global pasarán a ser las condiciones de contorno de desplazamientos “no-nulos” (es lo que se conoce como “enforced displacements“) que utilizaremos como cargas para calcular el modelo local y obtener el campo de tensiones resultantes.
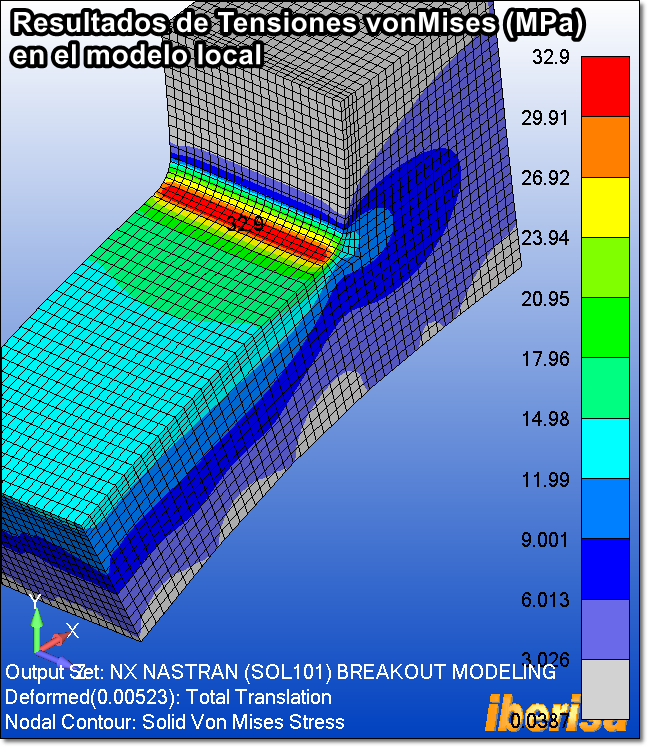
6.- Y finalmente tras ejecutar el análisis del modelo local pasamos a postprocesar los resultados de desplazamientos y tensiones. Vemos que la máxima tensión nodal de vonMises en el modelo global era de 17.14 MPa, mientras que ahora en el modelo local obtenemos un valor máximo de 32.9 MPa, ¡casi el doble!.
Esta técnica de “mapeado” de resultados Global-to-Localde FEMAP tienes múltiples aplicaciones y usos, por ejemplo las temperaturas obtenidas en un cálculo de Transmisión de Calor con NX Nastran (SOL153) o en un análisis de Fluidos (CFD) con FEMAP/FLOW pueden ser cargas en un modelo estructural mallado con diferente tipo de elemento y/o diferente densidad de malla para obtener las tensiones térmicas provocadas por el campo de temperaturas obtenidas por interpolación entre ambos modelos.
Aquí os dejo un vídeo donde explico el procedimiento paso-a-paso, espero que os sirva para utilizar la orden correctamente y os resulte útil e interesante!!.
Recibo muchas preguntas de clientes y usuarios de FEMAP y NX NASTRAN relacionadas con los elementos RBE2 y RBE3, y muchas veces veo un mal uso de los mismos en los Modelos de Elementos Finitos que me llegan, muchos no distinguen en general entre un elemento rígido RBE2 y otro RBE3, desconocen sus diferencias y por tanto qué tipo de elemento es el más adecuado en cada momento, así que voy a intentar aclarar los conceptos básicos para que de ahora en adelante quienes tengan problemas les sirva de ayuda.
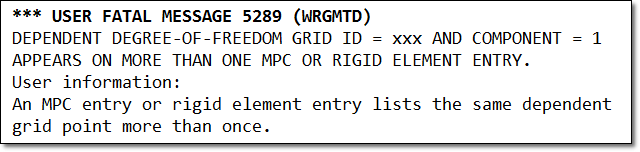
También otra fuente de error es el mal uso de los elementos RBE2 y RBE3 a nivel de mallado en el propio pre&postprocesador FEMAP, generando muchas consultas por motivos de error durante el posterior cálculo con el solver de Elementos Finitos NX NASTRAN: entre las más típicas se encuentran la doble-dependecia, tenemos que aprender a evitarlas desde el mismo momento del mallado!!. La doble dependencia ocurre cuando dos elementos rígidos comparten un nodo dependiente. Si tu modelo contiene doble dependencias, el solver NX NASTRAN no podrá resolver de forma correcta los grados de libertad del modelo, y te dará error. Los usuarios de NX NASTRAN tienen disponible el recurso PARAM,AUTOMPC,YES (en FEMAP se activa durante la definición del análisis en el NASTRAN Bulk Data Options) que automáticamente resuelve muchos de los problemas provocados por las dobles dependencias. Pero mi mejor consejo es resolver el problema por el propio usuario a nivel de mallado, no dejar que el solver NX Nastran tome decisiones por su cuenta, ¿OK?. Así que ya sabéis qué hacer cuando recibáis un mensaje de error del siguiente tipo:
Otro error típico es aplicar restricciones en nodos dependientes de cualquiera de los elementos rígidos RBE2 o RBE3. Por ejemplo, en la siguiente imagen el usuario ha creado un elemento RBE3 y en el nodo#9212 (el nodo central del spider) ha aplicado las restricciones TX=TY=TZ=0, error!!. El nodo#9212 es el nodo DEPENDIENTE del RBE3 que depende exclusivamente de los nodos INDEPENDIENTES del elemento RBE3 (los nodos en las “patas” del spider), un nodo puede pertenecer como máximo a un único set dependiente, por tanto no es posible aplicar ninguna restricción en nodos dependientes de los elementos rígidos, el error está segurado, OK?.
La descripción técnica es la siguiente: el problema ocurre cuando un grado de libertad (DOF) se define como dependiente de un MPC (el llamado M-set) y al mismo tiempo se aplica una restricción (el llamado S-set) con la orden SPC (Single-Point Constraint). El mensaje de error indica que el componente X (es decir, el DOF) está ilegalmente definido en el set UM (User-defined M-set) y en el set US (User-defined S-set). Ambos sets son mutuamente excluyentes ya que todas las ecuaciones MPC (Multi-Point Constraints) se procesan antes de aplicar los SPCs y los grados de libertad m-set se eliminan de la matriz. Cuando el solver NX NASTRAN intenta aplicar el SPC, el grado de libertad en cuestión ya no está disponible y aparece el fatídico mensaje de error FATAL. La corrección normal para que esto no ocurra es modificar el MPC de forma que el grado de libertad en cuestión sea independiente (N-set), entonces ya no hay ningún conflicto.
*** USER FATAL MESSAGE 2101 (GP4)
GRID POINT 9212 COMPONENT 1 ILLEGALLY DEFINED IN SETS UM US
GRID POINT 9212 COMPONENT 2 ILLEGALLY DEFINED IN SETS UM US
GRID POINT 9212 COMPONENT 3 ILLEGALLY DEFINED IN SETS UM US
Los elementos tipo-R son elementos que imponen restricciones fijas entre las componentes de movimiento de los nodos a los cuales se conectan. Por tanto, un elemento tipo-R es matemáticamente equivalente a una ecuación de restricción multipunto (es lo que se conoce como Multipoint Constraints Equations, MPC). Cada ecuación de restricción expresa un grado de libertad dependiente como una función lineal del grado de libertad independiente.
En general a los elementos tipo-R se les denomina elementos rígidos, pero no es correcto. Los elementos que son exactamente rígidos son los RROD, RBAR, RBE1, RBE2 y RTRPLT. Los elementos RBE3 y RSPLINE se denominan elementos de interpolación y no son rígidos, ¿queda claro?.
RBE2
Mezclar elementos cuya rigidez difiera órdenes de magnitud puede causar problemas de mal acondicionamiento de la matriz de rigidez (ill-conditioning error), provocando que el modelo de Elementos Finitos no se pueda resolver. Por ejemplo, simular una unión rígida usando elementos 1-D tipo viga CBAR/CBEAM con valores extremadamente grandes de sus Momentos de Inercia I1, I2 provoca, seguro, un error tipo ill-conditioning. El elemento RBE2 (Rigid Body Element, Type 2) de NX NASTRAN usa ecuaciones de restricción para acoplar el movimiento de los grados de libertad en los nodos dependientes con el movimiento de los grados de libertad del nodo independiente. En consecuencia, los elementos RBE2 no contribuyen directamente a la matriz de rigidez de la estructura y por tanto se evita el problema de ill-conditioning. El elemento RBE2 es una herramienta muy potente para conectar rígidamente diferentes componentes, o diferentes nodos del mismo componente juntos.
En un elemento RBE2 el nodo del centro del “spider” es el nodo con los seis grados de libertad INDEPENDIENTES, y los nodos en la base de las patas del spider son los nodos con los grados de libertad DEPENDIENTES, los cuales no pueden ser a su vez dependientes de ningún otro elemento rígido o restricción. El siguiente mensaje de error aparecería escrito en el fichero *.F06 si aplicamos restricciones en nodos dependientes pertenecientes a un elemento RBE2:
USER FATAL MESSAGE 2101 (GP4)GRID POINT xxx COMPONENT x ILLEGALLY DEFINED IN SETS UM US
La siguiente imagen muestra un elemento RBE2 que une rígidamente los nodos 1, 2, 3 y 4 (dependientes) con el nodo 101 (independiente). Los cuatro nodos dependientes se mueven en el espacio como un cuerpo rígido, sin movimiento relativo entre ellos, rotando y transladándose exactamente lo mismo que hace el nodo independiente 101.
Creación en FEMAP de un RBE2: jugando con los grados de libertad (DOF) activos en el campo DEPENDENT podemos conseguir los siguientes efectos:
WELD(unión rídida): activando los 6 grados de libertad TX, TY, TZ, RX, RY, RZ.
BOLT(unión atornillada): activando TX, TY, TZ (dejando libres las rotaciones).
RBE3
El elemento RBE3 es una potente herramienta para distribuir de forma eficiente cargas y masas en un Modelo de Elementos Finitos. Al contrario que el elemento RBE2, el RBE3 no añade rigidez adicional a la estructura. Las cargas de Fuerzas y Momentos aplicadas en el centro del spider (también conocido como nodo de referencia, o nodo dependiente) se distribuyen en los nodos independientes (también se les denomina master grids) de forma análoga al clásico análisis de tornillos, la fuerza se distribuye en los tornillos proporcionalmente a los factores de ponderación.
PASO#1: Las cargas aplicadas en el nodo de referencia se transfieren al centro de gravedad ponderado de los nodos independientes resultando en una Fuerza y Momento equivalente.
PASO#2: Las cargas de Fuerza & Momento aplicadas en el CdG se transfieren a los nodos independientes (master grids) de acuerdo con el factor de ponderación de cada nodo.
La masa aplicada en el nodo de referencia se distribuye en los nodos independientes de manera similar a las fuerzas, el mecanismo utilizado es el mismo.
La siguiente imagen muestra el elemento RBE3 creado en FEMAP: un error muy común es activar también los grados de libertad de rotación en los nodos independientes, ¡NUNCA!, la recomendación es activar únicamente los grados de libertad TX, TY, TZ, ¿queda claro?. En algún caso muy extremo tiene sentido activar los grados de libertad de rotación, por ejemplo cuando todos los nodos independientes sean colineales, y por lo tanto el RBE3 se hace inestable por rotación alrededor del eje.
Ejemplos de Aplicación
En primer lugar aquí os dejo un caso donde se hace un mal uso del elemento RBE2: se trata de aplicar una carga FX = 1000 N en el centro del agujero, tal como muestra la siguiente figura.
RBE2: la siguiente imagen muestra la deformada de cuerpo rígido del agujero cuando se utiliza un elemento RBE2 para distribuir la carga, claramente el elemento RBE2 rigidiza la estructura de forma artificial. El FREE BODY permite ver la distribución de cargas en los nodos del agujero, es todo menos regular!!.
RBE3: utilizando un elemento RBE3 la estructura se deforma según su propia rigidez, el elemento RBE3 no añade ninguna rigidez adicional, y el FREE BODY muestra una distribución de cargas regular (1000N/40 nodos = 25 N) ya que el nodo central del spider (dependiente) está en el CdG de los nodos del agujero (independientes).
Si el dispositivo utilizado para aplicar la carga no rigidiza la estructura, el uso de un elemento RBE3 siempre es la opción más razonable.
Aquí os dejo el vídeo donde explico el ejemplo paso-a-paso:
La siguiente imagen muestra un equipo hidráulico industrial formado por un depósito estructural sobre cuya tapa atornillada lleva amarrados diferentes componentes mecánicos (bloques hidráulicos, motores eléctricos, etc..) cuya masa y posición de su CdG es muy importante considerar en los diferentes análisis estáticos y dinámicos.
La siguiente imagen muestra el Modelo de Elementos Finitos del depósito hidráulico donde se utilizan elementos de masa puntual CONM2 colocados en el CdG de los componentes amarrados al tanque hidraúlico para capturar su masa, usando un elemento RBE3 para unirlos a la tapa del tanque.
La siguiente imagen muestra el detalle de la unión atornilla entre la tapa y el cuerpo del depósito: el tornillo se malla con un elemento viga CBAR y la unión entre la cabeza del tornillo con la tapa se realiza usando elementos RBE2 activando únicamente los grados de libertad de translación TX,TY,TZ en los nodos dependientes, dejando libres las rotaciones. Además, el contacto en la unión cuerpo-tapa se incluye en el cálculo utilizando elementos 1-D CGAP de contacto explícito nodo-a-nodo trabajando sólo a compresión.
El tercer ejemplo es una comparativa entre distribuir una carga en la estructura utilizando elementos RBE2 o RBE3. Es un ejemplo muy similar al primero, pero aquí voy a enseñaros cómo jugar con los factores de ponderación que ofrecen los elementos RBE3, así que aunque sea repetir algunos conceptos merece la pena. Aquí os dejo el vídeo donde explico el ejemplo paso-a-paso:
Se trata de una viga en voladizo en forma de Z mallada con elementos 2-D Shell CQUAD4 con un extremo totalmente empotrado y en el opuesto se aplica una carga transversal de valor FY=-1800 N (el nº total de nodos a lo largo del extremo libre es 18, por tanto en caso de una distribución uniforme la carga por nodo debería ser 1800/18=100 N).
RBE2: el FREE BODY de FEMAP muestra en el extremo libre una distribución de fuerzas todo menos uniforme, junto con el característico modo de deformación de cuerpo rígido.
Viendo la deformada se puede afirmar que los elementos RBE2 cumplen con la teoría de vigas (que por cierto, es una “castaña“, que nadie se confunda!!, es válida para secciones macizas, pero en secciones abiertas de pequeño espesor los elementos Shell CQUAD4 es la solución perfecta): la sección plana permanece plana.
Fíjate en el valor del desplazamiento resultante: URES = 0.178 mm.
RBE3: usando un factor de interpolación constante (opción por defecto) la carga es uniformemente distribuida en todos los nodos del extremo libre de la viga de valor 1800/18 = 100 N. Pero la distribución de carga uniforme provoca en las alas un exceso tanto de carga transversal como deformación.
El máximo desplazamiento es URES=3.091 mm.
RBE3 con factor de interpolación: aplicando un factor de ponderación de valor 1.0 conseguimos descargar un poco las alas, reduciendo la deformación máxima.
El máximo desplazamiento resultante URES=1.208 mm, pero todavía estamos lejos del obtenido usando elementos rígidos RBE2.
RBE3 con ponderación, pero distribuyendo la carga únicamente en el alma: vamos a asumir que la carga transversal únicamente se transmite a través del alma (es decir, que las alas no transmiten ninguna carga), manteniendo el factor de ponderación anterior.
En este caso los desplazamientos resultantes URES= 0.178 mm (asumiendo una pondearación cuadrática) son similares a los obtenidos inicialmente con un elemento rígido RBE2 (teoría de vigas), pero no impone la condición de que “las secciones planas permanecen planas” tal como hace el RBE2.
La clave: la fuerza cortante que actúa en el extremo libre de la viga no es lineal: alcanza su valor máximo en el plano neutro y se acerca a cero en la fibra superior e inferior.
Y para finalizar un último ejemplo para dar respuesta a la pregunta: ¿Cómo distribuye un RBE3 las cargas cuando la fuerza aplicada en el nodo de referencia (el nodo dependiente) no pasa a través del CdG de los nodos independientes (es decir, los master grids)?.
Pues aquí tenéis la respuesta: las fuerzas resultantes en el FREE BODY intuitivamente no son muy obvias, nótese que existen fuerzas en dirección opuesta en la parte izquierda de la placa. El momento provocado por el descentramiento de la carga hace necesario la aparición de fuerzas en sentido contrario para conseguir el equilibrio.
Nótese también la activación del grado de libertad RX en los nodos independientes, necesario para resolver el modelo ya que todos los nodos master están alineados, de lo contrario el solver NX NASTRAN os dará error.
Pues nada, espero que os sirva de ayuda y te resulte útil e interesante y disfrutes de los elementos RBE2 y RBE3 con FEMAP y NX NASTRAN tanto como yo escribiendo esta publicación!!.
En FEMAP desde hace varias versiones tenemos disponible una utilidad muy interesante para generar las propiedades de la Sección Transversal de elementos 1-D tipo viga CBAR/CBEAM a partir de la geometría CAD 3-D Sólida que permite crear el PUNTO DE REFERENCIA a la vez que seleccionamos la superficie correspondiente a la sección transversal de la viga sobre la geometría CAD 3-D. Para que se active esta opción durante la creación de la Sección Transversal de Vigas deberás seleccionar en FEMAP tanto el método Standard como Shape = General Section.
El Punto de Referencia sólo se usa cuando se asignan los atributos de mallado a curvas usando la orden Mesh > Mesh Control > Attributes along Curve, siendo una manera cómoda de definir automáticamente el #OFFSET del centro de cortadura en secciones no simétricas.
Aquí os dejo un vídeo explicando las ventajas de utilizar el PUNTO DE REFERENCIA a la hora de prescribir los attributos en curvas para mallar con elementos CBAR/CBEAM. Se trata de un ensamblaje de Aluminio 6066 (T6) compuesto por una placa de espesor 2.5 mm reforzada con perfiles tubulares de dimensiones 25x15x2.5 mm que se desean mallar con elementos 1-D viga CBEAM.
Se crea la superficie media de la placa para mallar con elementos 2-D Shell CQUAD4.
Modelo final con la placa mallada con elementos 2-D Shell CQUAD4 y las vigas malladas con elementos CBEAM. La curva utilizada para mallar las vigas es la misma curva de la superficie media, por tanto los elementos CBEAM comparten nodos con los elementos CQUAD4. La clave está en utilizar como REFERENCE POINT el punto situado en la curva de la superficie media.
Y aquí tenéis el vídeo con el ejemplo explicado paso-a-paso:
Voy a enseñaros algunas de las técnicas de Transición de Mallado 2-D que se pueden realizar en FEMAP sin problemas y que he utilizado recientemente en algunos proyectos con excelentes resultados.
Por ejemplo, la siguiente imagen muestra diferentes ejemplos de transición de malla (de izquierda a derecha) utilizando elementos 2-D triangulares. Tengo que decir que yo no soy muy amigo de usar elementos triangulares, pero esta técnica en especial me gusta porque la transición de malla es muy regular, y entendiendo la técnica de progresión ofrece muchas posibilidades para ajustarse a las necesidades de divisiones y nº de elementos de cada caso en particular.
CASO#1: Pasar de 10 a 5 elementos: la clave está en definir en los laterales 5 divisiones, en ese caso la malla resultante presenta el aspecto de la figura nº1. No hace falta definir ningún MESH > MESH CONTROL > MESHING APPROACH especial, no, el trucoestá en prescribir en los TRES BORDES LATERALESla MITAD de elementos que tenga el extremo director. Es decir: si tenemos A=10 elementos en el borde izquierdo, simplemente prescribiendo A/2=10/2=5 en los otros tres bordes obtendremos la malla de la figura nº1. Esto es aplicable para cualquier valor “par” de A.
CASO#2: Pasar de 10 a 4 elementos, con 6 elementos en el lateral. La clave está en definir en los laterales 6 divisiones, en ese caso la malla resultante presenta el aspecto de la figura nº1. Ya véis la progresión: si defines “n” divisiones en el borde lateral derecho, deberás prescribir “n+1” divisiones en los bordes laterales superior e inferior, siendo n=4,3,2
CASO#3: Pasar de 10 a 3 elementos, con 7 elementos en el lateral. La clave está en definir en los bordes laterales superior e inferior 7 divisiones.
CASO#4: ¿Y si el nº de divisiones en el borde izquierdo es impar?. Pues también funciona, aquí tenéis el ejemplo: Pasar de 9 a 4 elementos, con 5 divisiones en el lateral.
CASO#5: Pasar de 9 a 3 elementos, con 6 divisiones en el lateral. La clave está en definir en los bordes laterales superior e inferior 6 divisiones.
FEMAP™ V11.1 es la nueva versión del modelador geométrico, pre- y postprocesador de Elementos Finitos más potente del mercado, disponible ya para descarga desde el GTAC. FEMAP V11.1 incluye también la última versión del solver NX™ Nastran V9.0.
Gary Davidson, Senior Director del Dpto. de Estructuras de la empresa Revolution Design (Australia) nos explica en este vídeo cómo el uso de FEMAP y NX NASTRAN ha sido clave en el Diseño, Mallado y Análisis por Elementos Finitos de un Catamarán de alta velocidad.
“Midsurface Modeling” se denomina así el proceso de extracción de la superficie media entre dos caras paralelas de la pared de un sólido con el objetivo de preparar la geometría para mallar con elementos Shell 2-D CQUAD4 en orden a reducir la complejidad del modelo y aumentar la precisión y exactitud del Análisis por Elementos Finitos.
Es un recurso muy potente, versátil y de máxima importancia, particularmente en análisis avanzados (lineales y no lineales) donde, por ejemplo, sería imposible abordar un problema de Análisis No Lineal Dinámico Transitorio Implícito (SOL601,129) con cientos de steps en caso de mallar con elementos sólidos tetraédricos CTETRA, el tamaño de la base de datos sería enorme, probablemente cientos de Gigas, habría que disponer de cientos de GB de memoria RAM para poder abrir el modelo debido al enorme tamaño de la base de datos resultante. Por esta razón es crítico conocer bien cómo crear superficies medias de forma rápida y eficiente para mallar con elementos Shell CQUAD4, en la práctica profesional del experto analista son los elementos más utilizados.
En FEMAP existen numerosas funcionalidades para la creación más o menos automática de superficies medias, las dos más importantes son:
“Geometry > Midsurface > Automatic…“: agrupa en un mismo comando las tres órdenes siguientes de creación semi-manual de una superficie media: Generate, Intersect y Cleanup. La orden solicita que se introduzca una distancia máxima de búsqueda de pares de superficies, crea las superficies medias, las recorta y borra los trozos que sobran.
Las tareas que lleva a cabo esta orden son las siguientes:
“Geometry > Midsurface > Offset Tangent Surfaces…“: se utiliza preferentemente sólo con sólidos de espesor constante. La orden pide seleccionar una cara, busca todas las que sean tangentes en base a una tolerancia dada y genera la superficie media. Tiene una peculiaridad muy importante: las superficies medias generadas con el método OFFSET ya están “cosidas“, todas forman un único cuerpo, lo cual facilita el posterior mallado.
La utilización de una u otra orden dependerá en general del tipo de geometría de partida. Por ejemplo, en el siguiente modelo CAD 3-D sólido existe una intersección en T que condiciona como más adecuado el uso del método “Automatic” en vez de “Offset“.
La siguiente imagen muestra la malla generada a base de elementos Shell 2-D CQUAD4. Sobre dicha malla se representa el reparto de la calidad de los elementos utilizando el parámetro de distorsión de la malla ALTERNATE TAPER (se considera fallo cuando Q4_TAPER > 0.5) que en general es el parámetro de control de distorsión de la malla más exigente de NX Nastran con los elementos Shell CQUAD4.
La siguiente imagen muestra la distribución de la calidad de la malla en el modelo de elementos finitos utilizando el parámetro de distorsión de los elementos en base a la relación de aspecto (ASPECT RATIO, AR). Se considera fallo cuando el valor máximo es AR > 10.
Si quieres repetir este tutorial en tu propio ordenador pídenos los modelos con la geometría de entrada y te lo remitimos por e-mail, es un servicio gratuito y exclusivo para nuestros clientes de IBERISA.
























 En primer lugar aquí os dejo un caso donde se hace un mal uso del elemento RBE2: se trata de aplicar una carga FX = 1000 N en el centro del agujero, tal como muestra la siguiente figura.
En primer lugar aquí os dejo un caso donde se hace un mal uso del elemento RBE2: se trata de aplicar una carga FX = 1000 N en el centro del agujero, tal como muestra la siguiente figura.


 La siguiente imagen muestra un equipo hidráulico industrial formado por un depósito estructural sobre cuya tapa atornillada lleva amarrados diferentes componentes mecánicos (bloques hidráulicos, motores eléctricos, etc..) cuya masa y posición de su CdG es muy importante considerar en los diferentes análisis estáticos y dinámicos.
La siguiente imagen muestra un equipo hidráulico industrial formado por un depósito estructural sobre cuya tapa atornillada lleva amarrados diferentes componentes mecánicos (bloques hidráulicos, motores eléctricos, etc..) cuya masa y posición de su CdG es muy importante considerar en los diferentes análisis estáticos y dinámicos.


 El tercer ejemplo es una comparativa entre distribuir una carga en la estructura utilizando elementos RBE2 o RBE3. Es un ejemplo muy similar al primero, pero aquí voy a enseñaros cómo jugar con los factores de ponderación que ofrecen los elementos RBE3, así que aunque sea repetir algunos conceptos merece la pena. Aquí os dejo el vídeo donde explico el ejemplo paso-a-paso:
El tercer ejemplo es una comparativa entre distribuir una carga en la estructura utilizando elementos RBE2 o RBE3. Es un ejemplo muy similar al primero, pero aquí voy a enseñaros cómo jugar con los factores de ponderación que ofrecen los elementos RBE3, así que aunque sea repetir algunos conceptos merece la pena. Aquí os dejo el vídeo donde explico el ejemplo paso-a-paso:






 Y para finalizar un último ejemplo para dar respuesta a la pregunta: ¿Cómo distribuye un RBE3 las cargas cuando la fuerza aplicada en el nodo de referencia (el nodo dependiente) no pasa a través del CdG de los nodos independientes (es decir, los master grids)?.
Y para finalizar un último ejemplo para dar respuesta a la pregunta: ¿Cómo distribuye un RBE3 las cargas cuando la fuerza aplicada en el nodo de referencia (el nodo dependiente) no pasa a través del CdG de los nodos independientes (es decir, los master grids)?.
















